
| HOME |
マイコンカーを始めてから10年以上が過ぎましたが、未だに大きな壁として試練を与えてくれるのが「クランク」です。今回、この大きな壁を画像処理で越えたいと思います。
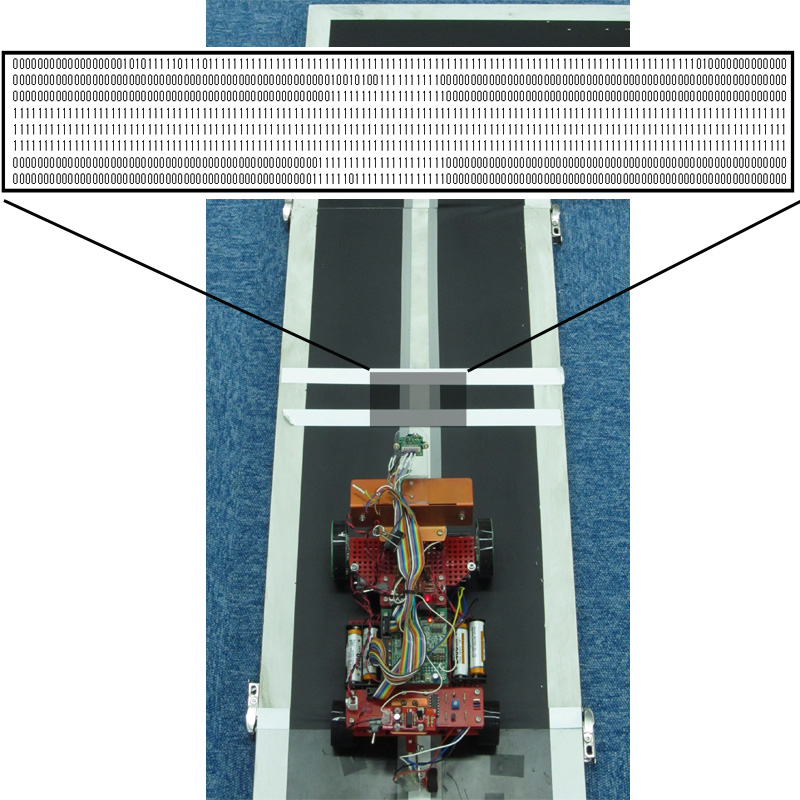
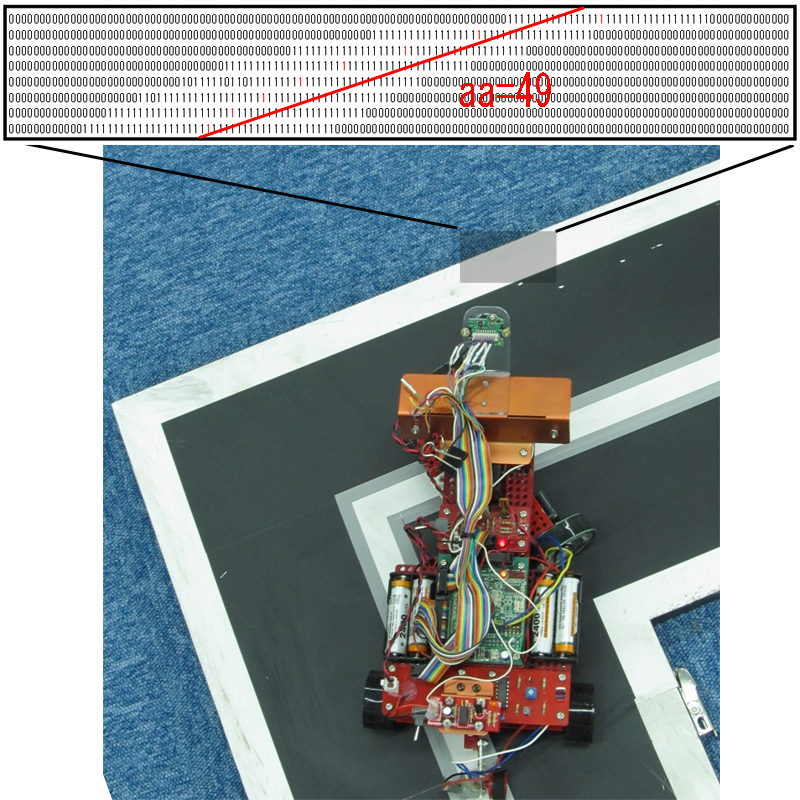
白の幅を測定し、測定幅が「100」以上ならばクロスラインを検出としクランク処理を行う。
ライン センター 幅
0 -4 43
1 0 10
2 -4 19
3 -1 127 ←クロスライン発見(ライン幅が100以上)
4 -1 127 ←クロスライン発見(ライン幅が100以上)
5 -1 127 ←クロスライン発見(ライン幅が100以上)
6 -6 21
7 -6 21
クロスラインを発見すけば、ブレーキを掛けながらクロスラインの先、約10cm先までロータリーエンコンダーの値で進む。
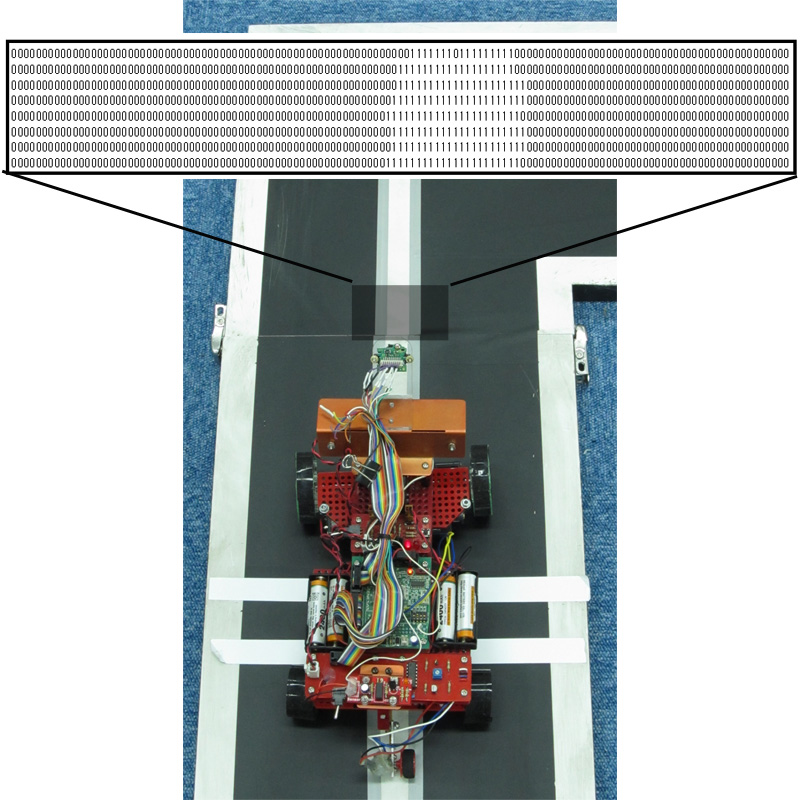
クロスラインを検出後、速度を落としながらライントレースを行いながら右クランク、左クランクかを探します。クランクの発見は白線の幅が「50」以上ならばクランクとし、左右はクランクとなる白線の重心位置が「+」ならば右クランク、「−」ならば左クランクとなります。
ライン センター 幅
0 -64 1
1 -64 1
2 25 76 ←クランク発見(ライン幅が50以上)センター値が25でプラスなので右クランク
3 -6 20
4 -6 21
5 -6 21
6 -6 21
7 -5 22
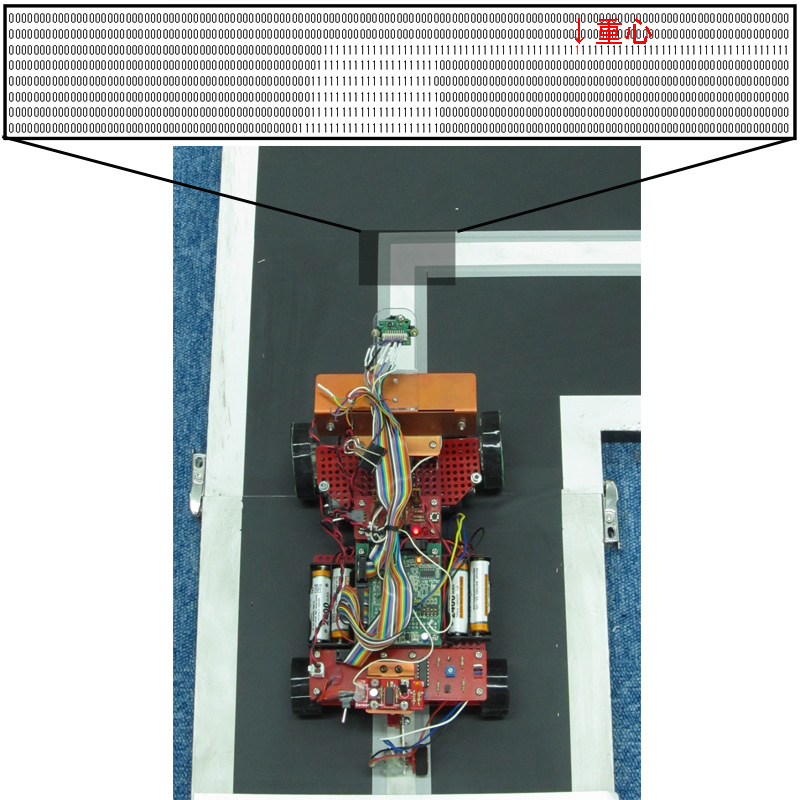
全体の白の割合が1割以下になった時に全て「黒」の領域とします。ここをクランク端とし、右にカーブとします。
クランクの方向に大きくハンドルを切る。この時、コースの外側の白線を見ているので、ある程度の時間、ハンドルを切ったままで曲がる。
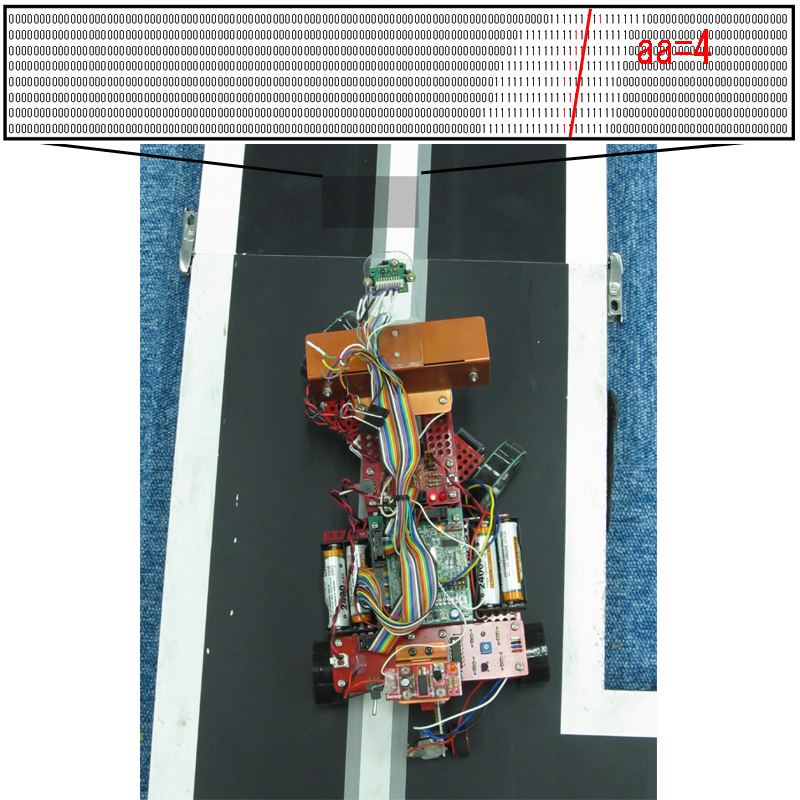
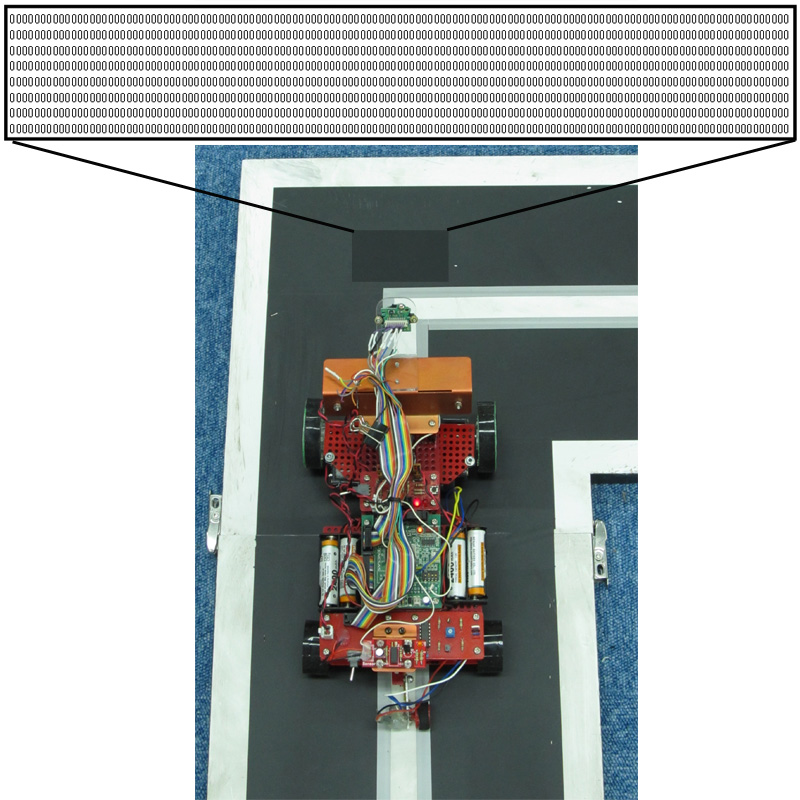
クランクの曲がり終了は、車体がだんだんと白線と平行になっていくので、白線の傾き(aa)から「±10」以下になれば、ほぼラインと平行になったと考えて通常のライントレースモードに移行します。
<< 最小二乗制御法(応用編) 目次 レーンチェンジ走行 >>