
| HOME |
丂幵懱偼僞儈儎偺儐僯僶乕僒儖僾儗乕僩偱嶌偭偰偄傑偡丅壛岺偑妝偵峴偆偙偲偑弌棃傑偡丅怓乆偲帋偟偰傒傞偵偼椙偄慺嵽偱偡丅偦偺懠偺晹昳傕儅僀僐儞僇乕偱巊梡偟偨晹昳偺巆傝偱嶌偭偰偄傑偡丅偟偐偟丄昁梫側傕偺傕偁傝傑偡偺偱丄夝愢偟偰偍偒傑偡丅
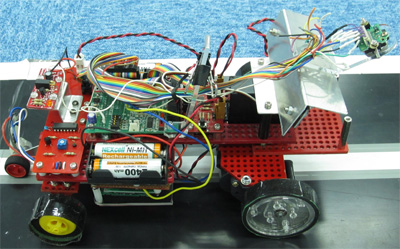
丂俀侽侽俉擭丄戝嶃揹捠戝帺桼岺朳偵偰乽夋憸張棟儅僀僐儞僇乕乿傝島廗夛偑峴傢傟傑偟偨丅偦偺島廗夛偵嶲壛偟偨偙偲傪偒偭偐偗偵夋憸張棟偱儔僀儞偲儗乕僗偡傞儅僔儞傪惢嶌偡傞傛偆偵側傝傑偟偨丅 偲尵偭偰傕僇儊儔偺惂屼曽朄偼丄偦偺帪偺島廗夛偱偄偨偩偄偨僒儞僾儖僾儘僌儔儉傪偦偺傑傑偱丄庢傝崬傫偩僨乕僞張棟偩偗傪峴偭偰偄傑偡丅 僇儊儔偼僎乕儉儃乕僀偱巊梡偟偨儌僲僋儘俠俵俷俽僇儊儔偱侾俀俉亊侾俀俉偺夝憸搙偱偡丅偄偨偩偄偨僾儘僌儔儉偱偼丄墶侾俀俉僪僢僩丄廲俉儔僀儞偲側偭偰偄偨偺偱丄偦偺傑傑巊梡偟偰偄傑偡丅
僇儊儔偺惂屼曽朄偵偮偄偰偼埲壓偺帺桼岺朳偺儁乕僕傪偛棗偔偩偝偄丅
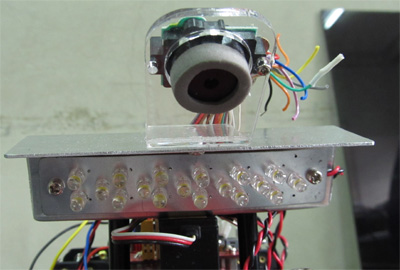
張棟曽朄偱夝愢偟傑偡偑丄杮棃丄僇儊儔傛傝摼傜傟偨僨乕僞傪乽敀乿乽崟乿偲敾暿偡傞応崌丄僸僗僩僌儔儉傛傝鑷抣傪妱傝弌偟俀抣壔張棟傪峴傢側偄偲偄偗傑偣傫丅偟偐偟張棟偡傞僨乕僞検偑丄寢峔側張棟検偲側偭偰偟傑偄傑偡丅偦偙偱丄崱夞丄岝傪堦掕検丄徠幩偡傞偙偲偱丄廃傝偐傜偺塭嬁傪彮側偔偟鑷抣偑曄壔偟側偄傛偆偵岝尮傪庢傝晅偗傑偟偨丅偦偆偡傞偙偲偱鑷抣偺寁嶼傪娙扨偵偡傞偙偲偱丄俀抣壔偺張棟傪娙棯壔偟偰偄傑偡丅僇儊儔偱撉傒庢傞嵺偺廳梫側傾僀僥儉偵側偭偰偄傑偡丅
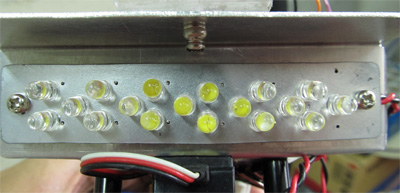
敀怓俴俤俢傪侾俉屄暲傋偰偄傑偡丅摿偵岝検傪寁嶼偟偨傢偗偱側偔幵懱偺慜偵偮偗傟傞偩偗偮偗傑偟偨丅傑偨丄僇儊儔偑尒偰偄傞偲偙傠偵岝偑岠棪傛偔峴偔傛偆偵庢傝晅偗嬥嬶偵妏搙傪晅偗偰偄傑偡丅
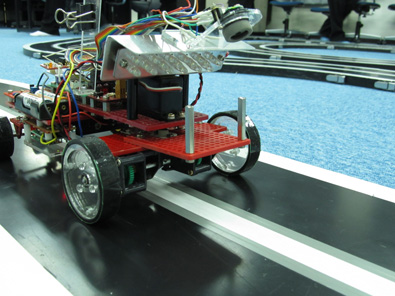
懍搙丄堏摦嫍棧偺應掕偼昁梫偱偡丅懍搙偑懍偔側偭偰偒傑偡偲儔僀儞傪僩儗乕僗偟側偔側偭偰偒傑偡丅偙偺曈偼僇儊儔偺僔儍僢僞乕懍搙偲傕娭學偟偰偄傞偲巚偆偺偱偡偑丄尰嵼挷嵏偟偰偄傑偣傫丅僗僺乕僪偺弌偟夁偓偼僐乕僗傾僂僩偱偡丅儗乕儞僠僃儞僕丄僋儔儞僋偲偙偙偱傕惓妋側懍搙惂屼偲堏摦嫍棧偺應掕偑昁梫偱偡丅儔僀儞僩儗乕僗傛傝傕幵懱偑戝偒偔堏摦偟傑偡偺偱丄傛傝暋嶨側張棟偑昁梫偵側傝傑偡偺偱丄懍搙偼偁傑傝弌偣傑偣傫丅傑偨丄張棟偟偨寢壥偵傛偭偰師偺峴摦傊堏峴偟傑偡偺偱丄憱峴嫍棧傕戝愗偵側偭偰偒傑偡丅
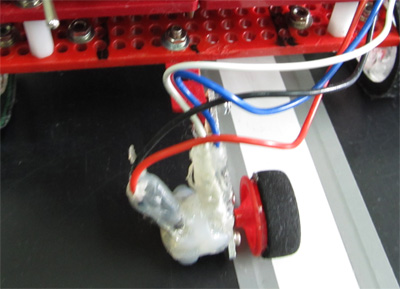
掅懍偱憱峴偝偣偰偄傑偡偺偱丄偙偺傑傑偱偼嶁摴傪搊傜側偄偺偱嶁摴偐偳偆偐傪専弌偟偰偄傑偡丅掅懍偱憱峴偟偰偄傑偡偺偱丄嶁摴傪搊傝傑偣傫偺偱昁梫側僙儞僒乕偱偡丅僙儞僒乕偼僟僀僙儞揹巕岺嬈偝傫偺儘儃僢僩僙儞僒乕偲偟偰攧傜傟偰偄傞傕偺傪峸擖偟偨傕偺傪巊梡偟偰偄傑偡丅尰嵼丄僟僀僙儞揹巕岺嬈偝傫偺儂乕儉儁乕僕忋偵偼埬撪偑偁傝傑偣傫丅偟偐偟丄儘儃僾儘僔儑僢僾偱偼攧傜傟偰偄傞傛偆偱偡丅
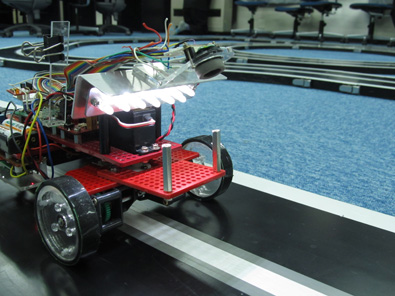
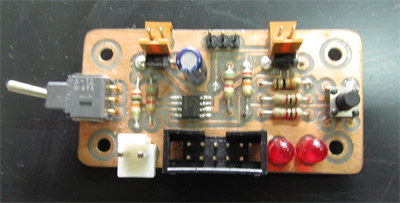
丂惓揮偺傒偺儌乕僞乕僪儔僀僶傪嶌傝傑偟偨丅嶌偭偨偼椙偄偺偱偡偑丄媡揮僽儗乕僉偑巊偊側偄偺偱丄儅僀僐儞僇乕儔儕乕偱偼巊偄摴偑偁傝傑偣傫偱偟偨丅夋憸張棟儅僀僐儞僇乕偺懍搙偼抶偄偺偱丄媡揮僽儗乕僉偼尰嵼偺偲偙傠昁梫偁傝傑偣傫偺偱丄偣偭偐偔偱偡偺偱巊偭偰偄傑偡丅偟偐偟丄偦傠偦傠媡揮僽儗乕僉偑傎偟偄偲巚偆偲偙傠傕偁傞偺偱丄僉僢僩偺儌乕僞乕僪儔僀僶偵曄峏偡傞偐傕傢偐傝傑偣傫丅幨恀偼丄昞柺偵怓傪揾偭偰偄傑偣傫偑丄幵懱偵搵嵹偺僪儔僀僶偼偍偟傖傟偵傕婥傪攝偭偰偄傑偡偺偱丄攝怓偟偰偄傑偡丅
丂夋憸張棟偼戝検偺僨乕僞傪張棟偟側偗傟偽側傝傑偣傫丅晛捠偺儅僀僐儞僇乕偺梡偵俤俤俹俼俷俵偵彂偒崬傫偱偄偨偺偱偼梕検偑懌傝傑偣傫丅俽俢偵曐懚偟偰偍偔偙偲傕峫偊傜傟傑偡偑丄崱屻偺壽戣偲偟偨偄偲巚偄傑偡丅尰嵼丄夋憸張棟儅僀僐儞僇乕偺憱傝偼懍偔偁傝傑偣傫丅恖娫偑敽憱偡傞偙偲傕壜擻偱偡偺偱丄僔儕傾儖億乕僩偐傜僨乕僞傪弌椡偟偰僷僜僐儞偱庴怣偡傞偙偲偑庤偭庢傝憗偄偱偡丅嵟弶丄働乕僽儖傪儅僀僐儞僇乕偵悅傜偟偰僨乕僞傪尒側偑傜張棟傪偟偰偄偨偺偱偡偑丄僷僜僐儞偼廳偨偄偟丄曕偔偺傕偟傫偳偄偟丄偲尵偆偙偲偱愺憪僊尋偺bluetooth(AG-BT20E丂尰嵼惗嶻拞巭)偱柍慄壔偟傑偟偨丅抣偼挘傝傑偡偑丄僷僜僐儞偼帩偨側偔偰傕椙偄偟丄堦弿偵曕偐側偔偰傕椙偄偺偱丄懱椡揑偵妝偵側傝傑偟偨丅
師夞偼僇儊儔偱儔僀儞偑偳偺傛偆偵尒偊偰偄傞偐偱偡丅